文章配图-1
「01、巡检机器人测绘勘察方案上装二开模块背景」
当前矿山、边坡、厂区堆场、水利堤岸、基建工地以及管线廊道等作业场景,若需执行地形复测、断面测量、三维建模、边界勘察等任务,普遍依赖常规巡检机器人。此类机器人仅具备基础的行走与视频采集能力,其原厂设计中的上装接口十分有限,软硬件架构封闭,难以直接适配三维激光雷达、RTK 定位单元、高清全景相机、倾角传感等测绘专用设备。硬件的加装及调试过程复杂,供电适配与走线布局同样面临诸多挑战。不同勘察项目在坐标解算方式、点云采集频率设定、航线规划方法、数据解算格式选择、精度要求阈值等方面各有不同,原生运动控制逻辑无法匹配测绘作业中匀速行进、定点停顿、同步避障采样等专业模式需求。机器人采集到的点云数据、坐标影像、地形信息,与现有CASS、BIM、GIS及勘察管理平台格式不兼容,数据导出、清洗、入库均需大量人工操作,极易由此产生数据链断裂现象。
「文章配图-2」
工业生产与能源场景--测绘勘察智能巡检
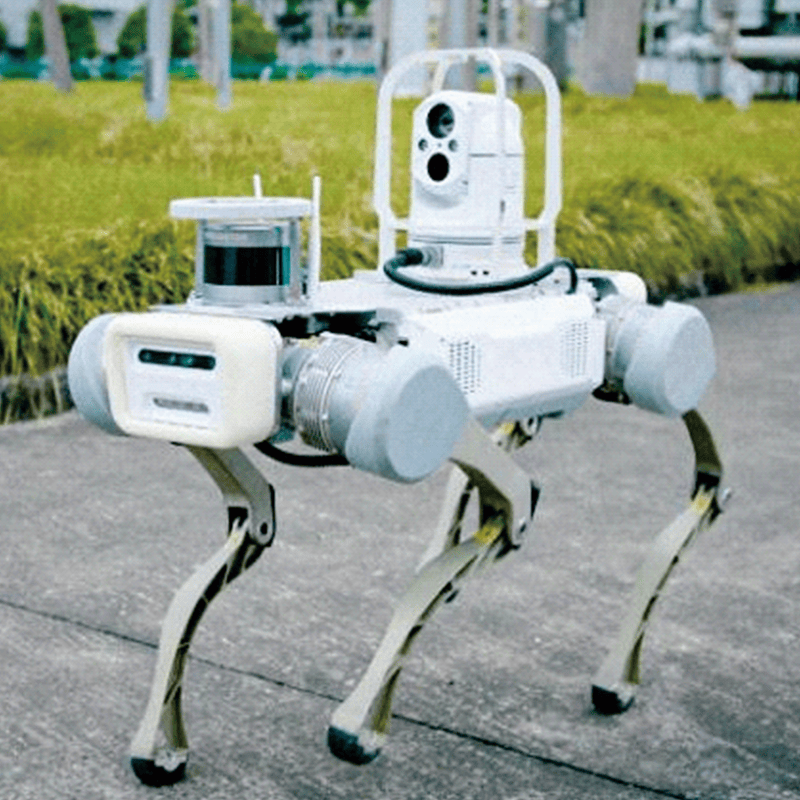
四足测绘机器狗集成了激光雷达、惯导系统、高清成像设备等测绘配置,凭借其爬坡、越障、窄道穿行等独特优势,能够深入陡坡碎石区域、高危临崖地带、密闭受限空间等人工作业难以触及的区域,独立完成实地测绘采集与常态化智能巡检任务。
三维实景建模
边行进边采集点云数据,自动构建出场地三维地形模型,有效替代传统人工打点测绘方式。
隐患智能研判
运用AI视觉技术联动传感单元,可自动识别边坡开裂、构筑物沉降、管线破损等问题,并准确标注位置坐标。
险域定点勘测
克服复杂地形限制,能精准完成高危禁区的高程测量与地貌取样等关键任务。
数据实时上云
测绘巡检数据通过无线网络即时回传,系统自动完成整编工作,彻底打通外业与内业之间的数据传输链路。
核心优势价值
高危勘察无需人员进入现场,显著规避安全风险
大幅压缩项目外业勘察所需时间
精简外勤测绘团队,有效控制综合成本支出
实现自动标准化采集,显著提升测绘数据精度
「文章配图-3」
部分二装模块
三维测绘雷达
该设备能够实时生成高精度的三维点云地图,精确呈现环境的几何结构特征。凭借高精度指标、全天候工作能力、极强的环境鲁棒性以及直接三维感知特性,已成为实现机器狗在真实复杂环境中开展高精度建图与自主导航的理想传感器选择。
点云地图:环境几何的精准复刻
以三维点云形态全面记录环境的形状、尺寸与空间布局,作为构建数字化空间的底层数据,为后续所有分析应用奠定基础。
栅格地图:自主导航的路径基石
将三维点云数据投影至二维平面生成栅格地图,清晰界定可通行区域与障碍物分布情况,为路径规划算法提供直观可靠的数据支持。
语义地图:赋予环境的智能理解
结合AI识别技术,可对地图中的实体附加"门、窗、设备"等语义标签,使机器具备环境认知功能,进而实现更智能的交互与任务执行。
「文章配图-4」
自主导航雷达
该设备支持高精度自主导航与地图构建功能,能有效避免碰撞障碍物。
多线激光雷达配置具备最远40米探测距离、360°水平视场角以及毫米级测距精度,可实时生成高精度三维点云地图。兼容同步定位与地图构建(SLAM)技术,能智能区分静态障碍物(如墙体、设备)与动态干扰源(如移动人员、掉落物),并迅速规划出最优规避路线。
机械臂
该部件具备多自由度灵活运转能力,能精准完成抓取、搬运、操作等各项自动化任务。
基于核心关节结构与运动控制技术,支持多种自由度构型灵活配置,可满足不同场景下的高精度作业需求。无论是工业装配、科研实验,还是人机协作应用,均可快速响应个性化设计要求。配合标准化软件接口与开放开发平台,可高效集成自定义末端执行器与智能算法,实现从硬件到软件的全方位定制开发。
声学相机
能够精准捕捉泄露及目标声源的信号特征。
内置高灵敏度麦克风阵列与自研声学成像算法,可在宽频段范围内采集环境噪声与目标声源信号,并以声像云图形式直观展示声源方位。设备接口设计为即插即用模式,运行功耗低,适用于狭小空间、长时间任务执行和多场景部署需求,运行始终保持稳定可靠状态。